�{�N�ɂ��킩��
IchigoJam�p�T���v���v���O����
I2C�ڑ�PWM���[�^�[�h���C�o
DRV8830�̐���
|
[IchigoJam ���j���[�֖߂�]
|
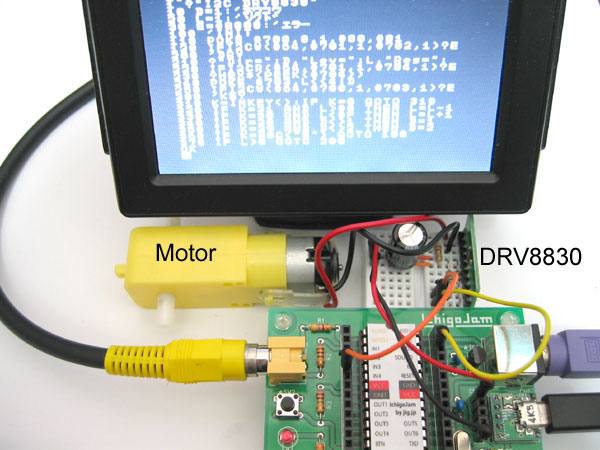
IchigoJam�Ƀ��[�^�[�ƃ��[�^�h���C�o��ڑ����������̗l�q |
|
�͂��߂�
�@���̃y�[�W�ł�I2C�ڑ�PWM���䃂�[�^�[�h���C�oDRV8830��MOS FET���g���ă��[�^�[�𐧌䂷�邽�߂̊ȒP�ȃn�[�h�E�F�A�����IchigoJam�p�T���v���v���O�����ɂ��ďЉ�܂��B�Ȃ����p�I�Ɏg�p����ɂ͓d����H�̌�������[�^�o�͒[�q(OUT1��OUT2)�ɃR���f���T������Ȃǂ̒������K�v�ł��B
�@�܂���DRV8830�ɂ��Đ������A�㔼��MOS FET�ɂ��Đ������܂��B�܂��ʃy�[�W�ł����A�\�t�g�E�F�APWM�̃T���v���v���O�����̐���������܂��B
|
|
PWM���䃂�[�^�h���C�o DRV8830
�@DRV8830�́ATexas Instruments �Ђ�I2C�ڑ���PWM���䃂�[�^�h���C�oIC�ł��B�d���d����2.75V�`6.8V�œ��삵�A���[�^�̐���]�A�t��]�APWM�ɂ�鑬�x�������\�ł��B�h���C�u�\�ȃ��[�^�[��1�ł��BPWM�o�͋@�\��IC�ɓ������Ă���A�o�͓d����ݒ肷�邾���ő��x���߂��o����_�������ł��B
�@���̃h���C�oIC�����W���[���ɂ�������H���d�q�ʏ�����̔�����Ă��܂��B�Q�l���i170�~�ƈ����ȓ_�������̈�ł��B��ʓI��MOS FET���Ń��[�^�h���C�o�삵���ꍇ�APWM�̓}�C�R�����Ɉς˂邱�ƂɂȂ邱�Ƃ�A�n���_�t�����e�Ղȍ��o��FET�������ł��邱�Ɠ����l����ƁADRV8830�̗D�ʐ����ǂ��킩��Ǝv���܂��B
|
|
DRV8830 �n�[�h�E�F�A�̐���
�@�����ł̓u���b�h�{�[�h��ɐ��삵�܂��B�{IC�̃s���z������\�Ɏ����܂��B
| Pin |
�ڑ� |
|
Pin |
�ڑ� |
| 1 |
OUT1 |
|
10 |
I2C_SCL |
| 2 |
ISENSE |
|
9 |
I2C_SDA |
| 3 |
OUT2 |
|
8 |
A1 |
| 4 |
VCC |
|
7 |
A0 |
| 5 |
GND |
|
6 |
FAULTn |
�@OUT1��OUT2�ɂ̓��[�^�[��ڑ����܂��B���s��0.1uF���x�̐ϑw�Z���~�b�N�R���f���T������ƃm�C�Y��ጸ���邱�Ƃ��o���܂��B
�@�d�������ݒ�p�̓��͒[�qISENSE�ɂ�GND�ɑ���1���ȉ��̒�R��}�����܂��B1����200mA�ł��B������0.5���ɂ����400mA�ɂȂ�܂��B
�@4�ԃs����VCC�ɂ�5V�d����ڑ����܂��BIchigoJam��3.3V�͓d���s���̂��ߐڑ����邱�Ƃ��o���܂���B�����ł�USB��5V��ڑ����܂��B5�ԃs����GND�ł��B
�@6�ԃs������8�ԃs���ɂ͉����ڑ�����K�v�͂���܂���B
�@9�ԃs����I2C_SDA��IchigoJam��IN3�ɐڑ����A10�ԃs����I2C_SCL��IchigoJam��EX1�ɐڑ����܂��B������I2C�ʐM���s�����߂ɕK�v�Ȓ[�q�ł��B�܂��A10k���̃v���A�b�v��R��VCC(5V)�ɐڑ����܂��B
|
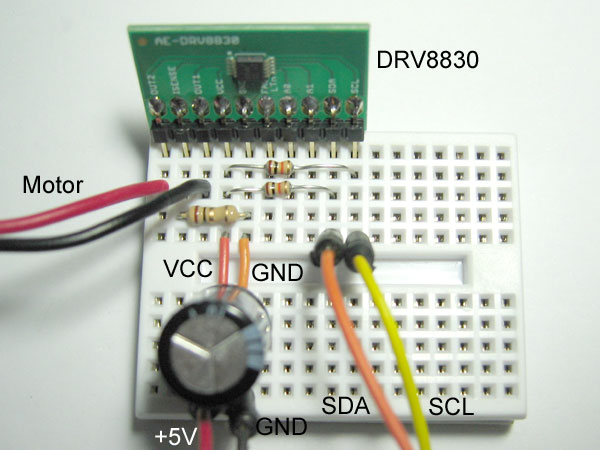
���[�^�h���C�o�𓋍ڂ����u���b�h�{�[�h |
|
DRV8830 ����p�T���v���v���O����
�@���L�ɃT���v���v���O�����������܂��B���s����ƁA�L�[�{�[�h�̏㉺�L�[�Ń��[�^�̉�]���x���A���E�ʼn�]������ύX���邱�Ƃ��o���܂��B
�@���쒆�ɕ\�������uDir�v�͉�]�������A�uLev�v�͉�]���x�A�uRes�v��IC����̉����l�������܂��B�����l��0�ł���ΐ���ł��B�G���[�����������ꍇ�A�uE�v�L�[����������ƃG���[����������M�����o�͂��܂��B
�@�I���͉��L�[���uLev=0�v�ɂȂ�܂ʼn��������܂��B
1 ?"I2C DRV8830"
10 D=1:'�
20 L=1:'����
30 E=#8000:'�װ
100 'INIT
110 POKE #700,0,1,#80,#01
120 IFI2CW(#64,#701,1,#702,1)?E
200 'DRV
210 ?"Dir=";D,"Lev=";L,"Res=";
220 IFI2CR(#64,#701,1,#704,1)?E
230 ?HEX$(PEEK(#704))
240 POKE #703,L<<4|D
250 IFI2CW(#64,#700,1,#703,1)?E
300 'KEY
310 K=INKEY():IF K=0 GOTO 310
320 IF K=31 AND L>#0 THEN L=L-1
330 IF K=30 AND L<#F THEN L=L+1
340 IF K=28 AND D<>1 THEN D=1
350 IF K=29 AND D<>2 THEN D=2
360 IF K=ASC("E") GOTO 100
370 IF L>0 GOTO 200
|
|
|
DRV8830���g�����ꍇ�̉ۑ�
�@�uRes�v�Ɂu4�v�܂��́u5�v�̉����邱�Ƃ�����܂��B����͓d���ቺ�ɂ���쓮�h�~�̃G���[�iUVL0�j�������Ă���A�d���������s�\���������胂�[�^�ւ̓˓��d�����傫���ꍇ�ɔ������܂��B�u4�v�̏ꍇ�A���ɓd�������A���Đ���ȏ�Ԃł��邱�Ƃ������܂��B
�@���[�^���~�܂��Ă��܂��悤�ȏꍇ�͑K�v�ł��B�����̏ꍇ�AVCC��GND��100uF�ȏ�̓d���R���f���T��}�����邱�Ƃő\�Ǝv���܂��B
�@����ɁA���[�^�o��OUT1��OUT2�Ƃ̊Ԃ�0.1uF���x�̐ϑw�Z���~�b�N�R���f���T��}������Ɨǂ��ł��傤�B0.1uF��傫������Ɠd���������߂Ȃǂ̑��̖�肪��������ꍇ������̂ŁA�傫����悢�Ƃ������̂ł͂���܂���B�܂��t��]���ɋt�d����������̂œd���R���f���T�̂悤�ȋɐ������܂��Ă���R���f���T���g�p���邱�Ƃ͏o���܂���B
|
|
MOS FET�ɂ�郂�[�^�h���C�o�̐���
�@����MOS FET���g�����ꍇ�̐����������܂��BIchigoJam BASIC�t�@�[���E�F�A��Version 1.0.2 beta 7����T�|�[�g���ꂽPWM����(�����ݒ�@�\��)���T�|�[�g����o�[�W�������K�v�ł��B�����ł�Version 1.0.2 beta 9�ɂē�����m�F���Ă��܂��B
|

IchigoJam BASIC���������}�C�R���{�[�h���MOS FET���[�^�h���C�o��ڑ����������̗l�q |
|
MOS FET �n�[�h�E�F�A�̐���
�@MOS FET�iPch�j�ɂ͎莝���̓s���ŁAInternational Rectifier����IRFU9024NPBF��p���܂����B����FET�̌��_��VGS��4V�ƍ������߃Q�[�g��5V���K�v�ȓ_�ł��B�����ł̓Q�[�g��FET�p�̓d����1k���Ńv���A�b�v���A�G�~�b�^�ڒn�̃g�����W�X�^2SC1815�Ńh���C�u���܂��B�g�����W�X�^�̃R���N�^��FET�ɁA�x�[�X��10k���̒�R���o�R���ă}�C�R����OUT2�[�q�ɐڑ����܂��B
�@�ȉ��̎ʐ^�̍��̂ق��Ɏ��������l�p��IC��FET�A���̂����E�ɂ���̂��g�����W�X�^�A����ɉE�ɂ���̂̓}�C�R���̓d���p��3.3V�̃��M�����[�^IC�ł��B
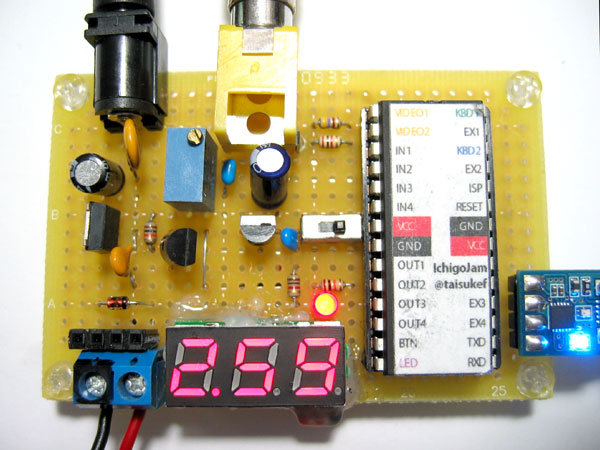
��̐����
�@�d���ɂ�DC�W���b�N����5�`9V���炢����͂��邱�Ƃ�z�肵�Ă��܂��BMOS FET�̃\�[�X�[�q��DC���͂ցA�h���C�����o�͂ڑ����܂��B���̃h���C���o�͂ƃ^�[�~�i���u���b�N�[�q�Ƃ̊ԂɃ|���X�C�b�`�i���Z�b�^�u���E�q���[�Y�j��}�����A�d���𐧌����܂��B�ʐ^�ł͓��͂ɂ��|���X�C�b�`�������Ă��܂����A�����炪��ɎՒf�����ƃ}�C�R������~���Ă��܂��܂��̂ŁAFET�̏o�͂̃|���X�C�b�`�̏��Ȃ��Ƃ�2�{�ȏ�̎Ւf�d���̃|���X�C�b�`������悤�ɂ��܂��B�ʐ^�̗�ł͏o�͑���200mA�̂��̂��A���͑���500mA�̂��̂����܂����B
�@�o�͒[�q�ɂ͋t���h�~�p�̃_�C�I�[�h��2�[�q�Ԃɑ}�����Ă��܂��B�c�F�i�[�_�C�I�[�h��p����R�C���ɂ�鍂�d����ی삷�邱�Ƃ��\�ł��B
�@�܂�FET�̏o�͂𑽉�]�{�����[��50k���ŕ������A�A�i���O���͂ɑΉ�����IN2�[�q�ɓ��͂��܂����B�����o�͂ɂ�0.1uF�̃R���f���T��}����PWM���ɕϊ����Ă��܂��B
�@���̂悤�ȉϒ�R���g�����Ƃŕ��������������邱�Ƃ��o���܂��BIchigoJam BASIC�͐������Z�����T�|�[�g���Ă��Ȃ��̂ŁA���Ƃ���FET�o�͂�1V�̂Ƃ���AD�ϊ����ʂ�100�ɂȂ�悤�ɒ�������AFET�̏o�͓d���̊��Z���e�ՂɂȂ�܂��B�����ł�1V����100�ɂȂ�悤�ɒ���������ŁA10���AD�ϊ����ʂ̑��a���v�Z���邱�ƂŁA���傤�ǒP�ʂ�mV�i�~���{���g�j�̓d����������悤�ɒ������܂����B�Ȃ�5V�ȏ�̓d�����g�p����ꍇ�́A�K���{�����[�����ŏ��i�Ⴂ�d�����}�C�R���ɓ��͂����悤�j�ɂ��܂��B
�@���̑��̃r�f�I�o�͂�d���v�A�V���A�����͒[�q�AOUT2�̓���m�F�pLED�Ȃǂ͗p�r��D�݂ɉ����Ēlj����܂��B
|
|
MOS FET ����p�T���v���v���O����
�@���L�ɃT���v���v���O�����������܂��B���s����ƁA�L�[�{�[�h�̏㉺�L�[�Ń��[�^�̉�]���x���A���E�ʼn�]������ύX���邱�Ƃ��o���܂��B
�@���쒆�ɕ\�������uDir�v�͉�]�������A�uLev�v�͉�]���x�A�uRes�v��IC����̉����l�������܂��B�����l��0�ł���ΐ���ł��B�G���[�����������ꍇ�A�uE�v�L�[����������ƃG���[����������M�����o�͂��܂��B
�@�I���͉��L�[���uLev=0�v�ɂȂ�܂ʼn��������܂��B
1 ?"PWM Driver with ADC"
20 L=0:'����
100 'INIT
110 OUT 2,0
200 'DRV
210 ?"Lev=";L,"PWM=";
220 PWM 2,L,16:A=0:WAIT 10
230 FOR I=1 TO 10
240 A=A+ANA(2)
250 NEXT
260 ? A;"mV"
300 'KEY
310 K=INKEY():IF K=0 GOTO 310
320 IF K=31 AND L>=0 THEN L=L-1
330 IF K=30 AND LD<#F THEN L=L+1
370 IF L>=0 GOTO 200
|
�@���̗�ł͑��肵���d����\�����邾���ł����A���̓d�������ɕۂt�B�[�h�o�b�N������s�����Ƃ��\�ł��B���Ƃ��A�d���Ƀo�b�e�����g�p�����ꍇ�Ȃǂɓd�r�̎c�ʂɊւ�炸���̏o�͂�ۂ悤�Ȑ�����\�ł��B�܂��z������d�����~���������ɃV���[�g�Ɣ��f���APWM�o�͂��~����Ȃǂ̕ی쐧����s����ł��傤�B
|
|
���[�^�h���C�o�p�v�����g���
�@�d�q�H�삪���ȕ��Ƀv�����g��i�v���c�t����Ɓj���������ł��B�����ŏЉ���h���C�o�Ƃ͈قȂ�܂����A��r�I�A�ȒP�Ȕ��c�t����ƂŃ��[�^�������߂̃n�[�h�E�F�A�삷�邱�Ƃ��o���܂��B�i�\�t�g�E�F�A�ɂ��PWM����j
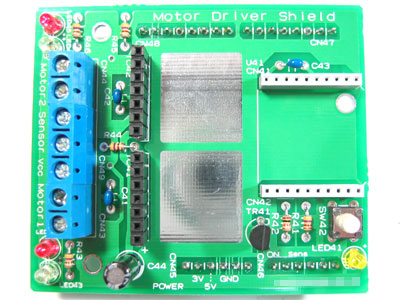
���[�^����p�̐�p���[Motor Shield]
|
|
�f�ڏ��ɂ���
- ���ǂ��p�\�R�� IchigoJam��p�����d�q�H��A���p��H�ABASIC�v���O���������Љ�Ă��܂��B
- IchigoJam �͊������ jig.jp �̓o�^���W�ł��B
- �{�T�C�g�� jig.jp �� B Inc.�APCN �̍쐬���ł͂���܂���
- ���E�F�u�T�C�g�̓��e����ɂ��ẮA�����g�̐ӔC�ł����p���������B
����i�ȂǂŎ��̂����������ꍇ�ł����Ă������͈�̕⏞���������܂���B
|