IchigoJam 内蔵 Raspberry Pi を作成してみました。
目次
まえがき:
ネットに繋げたIchigoJamを外出先からアクセスしたいと思っていたのですが、IchigoJamをサーバとして動かすのは危険です。IchigoJamサーバはESCコード一つでプログラムを停止させることが出来、さらに停止後はBASICのダイレクトモード(コマンド入力モード)に入ってしまいます。このため、IchigoJamを踏み台にした他のネットワーク機器への攻撃を受ける懸念が高いのです。そこで、ネットに接続したRaspberry Piを経由してIchigoJamにアクセスする方法が無難だと思うようになりました。
今日の実験:
今日のところは、IchigoJamとRaspberry Piがうまく会話できるかどうかを試してみました。ネットで拾ってきたTinyTermを「Petit Ichigo Term」という名前に変更し、実行してみました。
接続図:
[PC] —SSH—> [Raspberry Pi] —UART—> [IchigoJam]
実験の様子:
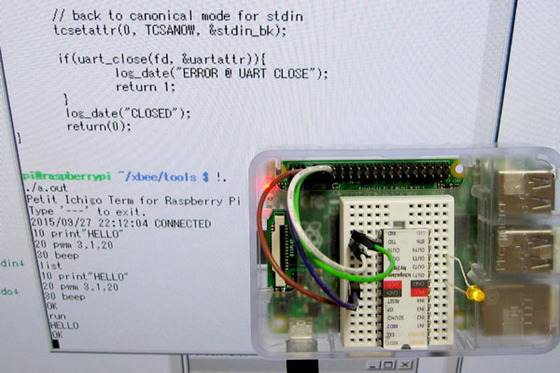
配線図:

設定
Configurationの「Serial」をDisableにする。
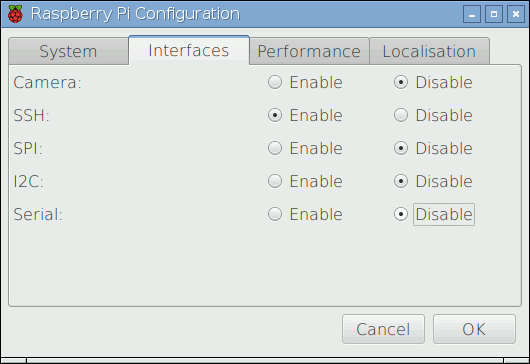
または、下記のコマンドを実行し、
sudo raspi-config
サブメニューA8:Serialの「NO」を選択する。
ソフトウェア(Petit Ichigo Term):
最新版は、こちらから:
元となるソフトのUARTパラメータ(ボーレート、ローカルエコー、改行コード)をIchigoJam用に変更し、また簡単なタイムスタンプと「—」による終了、終了時にカノニカルモードに戻す機能などを追加しました。元のソフトでカノニカルとローカルエコーを否にしているのですが、そこは保留したまま(つまりは余計なものの追加)で対応しました。
今後の目標:
ハードウェア面では SSOPのマイコンを使ってIchigoJam内蔵が分からないくらいにしたいです。またIchigoJam BASICのファームのアップデートにも対応したいと思います。しかし、以下の課題で悩んでおり、しばらくはこのままかもしれません。
課題:
悩ましいのはIchigoJamをどう活かすかです。小型のPetit Ichigoマイコンを Raspberry Piに内蔵することで、 Raspberry Piに出来ない何かが出来れば良いのですが、今のところ「IchigoJam BASICを外出先から動かす」「しかもパソコン経由に比べて低消費電力!」くらいの用途しか見当たらないのが残念なところです。
参考資料:
ボクにもわかるIchigoJam:
その後の記事
接続方法の違いで以下の3つの記事を公開しています。
①ジャンパー線で接続する(このページ)
https://bokunimo.net/blog/raspberry-pi/174/
③Bluetoothで接続する
https://bokunimo.net/blog/ichigojam/164/
https://bokunimo.net/blog/raspberry-pi/174/
③Bluetoothで接続する
https://bokunimo.net/blog/ichigojam/164/
https://bokunimo.net/blog/ichigojam/164/